
In our last ON&T article in late 2024, we described two types of Underwater GPS offered by DBV Technology—Portable Underwater GPS (PUG™) and inverted Long Baseline (iLBL™). Throughout 2025, DBV Technology has been busy testing and refining both systems, but in this article, we focus exclusively on the iLBL™ approach.
Underwater GPS usually refers to underwater positioning for platforms in dynamic motion to allow navigation and geodetic referencing of payload measurements (side-scan or bathymetric sonar, magnetometers, etc.) or images (video from ROV). Underwater GPS, as the name implies, is an underwater positioning system.
However, it is also a misnomer in the sense that no underwater positioning system can provide truly global coverage, and instead, can only achieve coverage over a limited regional area. Despite this limitation in naming, the use of Underwater GPS persists because of other features and similarities between this form of underwater positioning and its space-based counterpart.
Instead of radio signals as used in satellite GPS, Underwater GPS employs transmission and reception of underwater acoustic signals to perform positioning, but in a manner analogous to that of the GPS satellite. DBV Technology has developed two types of Underwater GPS systems which we refer to as Portable Underwater GPS (PUG™) and Inverted Long Baseline (iLBL™).

REAL-TIME POSITIONING
In iLBL™, submerged assets are equipped with an acoustic transmitter (pinger) that continuously emits uplink signals. This pinger can be self-contained (its own pressure vessel and power supply) or integrated into the underwater vehicle pressure vessel with a remote transducer.
Positioning is performed by having several (3 or more) surface platforms receive the uplink transmissions and obtain timing measurements relative to the surface platform GPS position and time. Measurements from all surface platforms are broadcast to a common base station by radio link for calculation of positions of the submerged platforms. In the iLBL™ approach the operator also now has a continuous real-time position of the submerged platforms.
The primary application for iLBL™ is the tracking of ROVs, where the pilot wants to be able to determine ROV position with high accuracy, high reliability, low latency, and at a high update rate. Therefore, iLBL™ achieves the benefit of traditional LBL with seafloor- based transponders but without the need for deployment and survey (calibration) or the limitations of acoustic propagation between assets operating in the same stratum.
POSITIONING IN SHALLOWS & DEEP SEA
There are two main implementations of iLBL—shallow and deep. The distinction between these is the platform on which the uplink receiver is hosted. In shallow iLBL™, the uplink receiver is hosted on a buoy anchored to the seabed. In deep iLBL™, the uplink receiver is hosted on an autonomous surface vessel (ASV) operating in a station keeping mode.
Here we detail our prototype shallow water system validated on a Blue ROV from Blue Robotics. The company plans to preview the commercial production system at the Workboat Show Fall 2025 and begin accepting orders in early 2026.
A shallow water iLBL™ system is comprised of the following components:
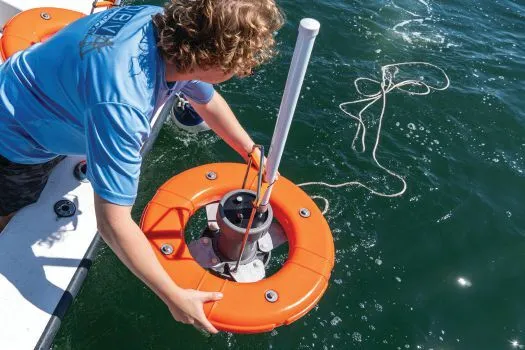
- Set of iBuoys
- Pinger (installed on ROV or another underwater object)
- Base station receiver connected to piloting laptop
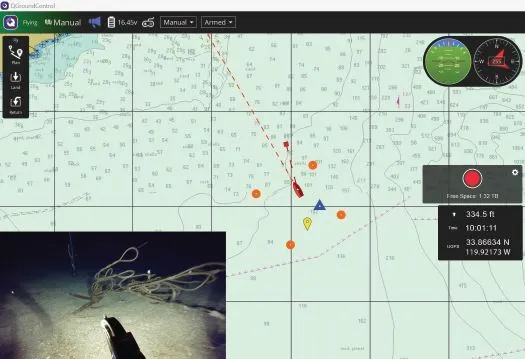
Figures 1 and 2 show the iLBL™ implementation hardware (iBuoy™ and pinger hardware on ROV). Figure 3 shows the user interface receiving positions and displaying on chart.
This feature appeared in ON&T Magazine’s 2025 October Edition, Subsea Infrastructure: Integrity & Security, to read more access the magazine here.
