The Widefield Camera Array was custom-built by The Sexton Corporation to mount onto remotely operated vehicles (ROVs) to capture immersive, high-resolution cinematic footage of deep ocean discoveries. When integrated with OET’s other data systems, these cameras collect high-fidelity reference imagery suitable for advanced three-dimensional modeling and simulation.
Rated to a depth of 6,000 meters, the system consists of three genlocked cinema cameras selected for their exceptional low-light capabilities and image fidelity. Each camera features a 24-megapixel full-frame sensor capable of capturing images at 60 frames per second with a resolution of 6064 x 2560 pixels.
When operating as an array, two cameras are configured to record stereoscopic images, each providing a 180-degree field of view, while the third camera provides a rectilinear image of an additional 60–107 degrees. This setup enables the generation of content ready for virtual reality and advanced 3D reconstruction, offering an unprecedented panoramic view of the underwater world.
TRIED AND TESTED
This new technology was first deployed and tested in October 2023 during the EV Nautilus Exploration Through Advanced Imaging expedition (NA156). Over the two-week expedition, some of the most complex and stunning underwater terrains throughout the Hawaiian Archipelago were explored, including submarine cliffs, pinnacles, large WWII submarine wrecks, and the active submarine volcano Kama’ehuakanaloa Seamount. Throughout the expedition, cameras collected over 8.5 terabytes of high-resolution video and photos. These files were used to test near-real-time generation of seafloor models using edge-based processing techniques.
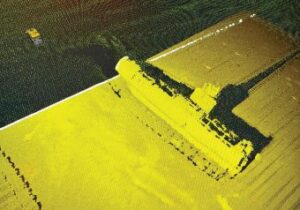
The technical innovation of the camera array lies in its ability to utilize the entire forward light pool generated by OET’s ROVs while collecting spatially-referenced imagery across different angles of view. The two stereoscopic cameras enhance depth perception in surveyed areas, whereas the third camera collects high-fidelity still images, which are spatially calibrated to other data systems on the ROV. During the expedition, a Norbit wideband multibeam sonar was mounted on the ROV and used to generate ultra-high-resolution maps of the seafloor.
In tandem, a customized software package was developed to take raw data collected by the Norbit sonar and allow the onboard team to visualize it in three-dimensional space in real-time.

RAPID DATA ANALYSIS
High-resolution visual and acoustic data collected by the ROV-mounted sensors can be used to develop high-fidelity georeferenced models of surveyed landscapes. While similar technology has been applied before in deep ocean exploration, recent advances in commercially available data processing tools now significantly narrow the time delay between data collection and analysis, thereby allowing models to be built in near real-time and support decision-making in the field.
Talking exclusively to ON&T, Jonathan Fiely, OET Media Production Specialist and lead designer of the system, said: “The Widefield Camera Array has the potential to transform our immersive exploration and understanding of the oceans. Data collected with the system has equipped OET and our partners with the tools to create photorealistic virtualized deep-sea environments. In the years ahead, we see this new technology as instrumental to the accurate visualization of underwater landscapes throughout the Pacific Ocean and beyond.”
nautiluslive.org
This story was originally featured in ON&T Magazine’s June 2024 issue. Click here to read more.