Reliable Gyro Stabilization for Surveillance Sensors
The NSM 400 was primarily designed for the stabilization of surveillance sensors on medium (starting from 1.0 kt onwards) to large maritime vessels. Un-stabilized systems follow the movement of the water caused by the swell which adversely affects the detection and threat-tracking capabilities of the sensor. Using a Gyro Stabilization Mount ensures a stabilized field of view and high-resolution images by compensating the movements of the vessel. This allows EO/IR systems to scan their environment without interference even in extreme sea conditions, in order to best detect, track and classify asymmetric air and surface threats. The NSM 400 is the perfect gimbal for IRST (infra-red search and track) and other surveillance systems to ensure 360° protection for surface vessels of naval forces.
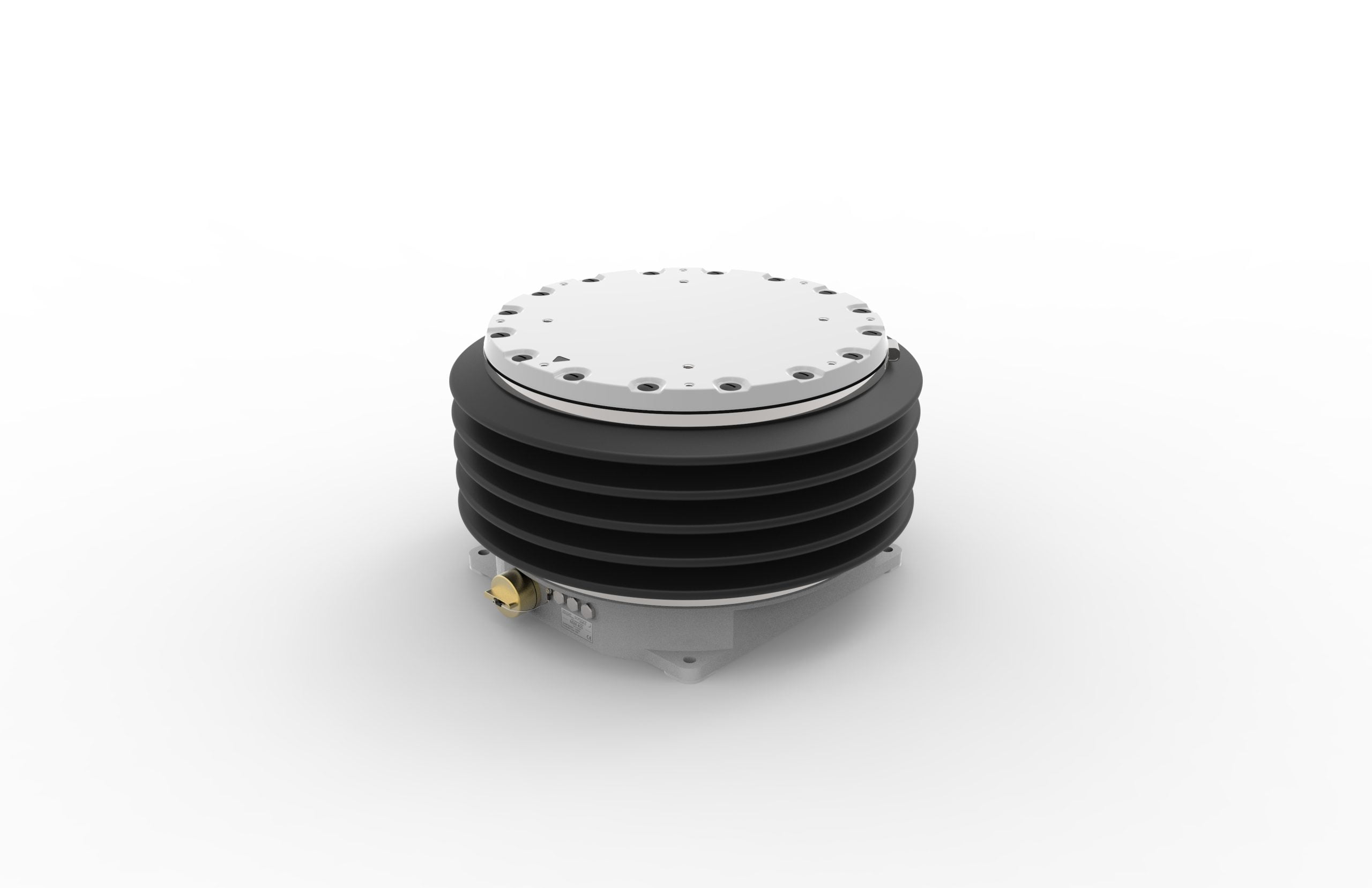 The NSM 400 is a high-precision gimbal for offshore stabilization of sensor systems
The NSM 400 is a high-precision gimbal for offshore stabilization of sensor systems
Highest torque and stabilization range for the best gimbal performance on the market
Like all SOMAG marine Mounts, the NSM 400 is IP 67 compliant and made to perform in very rough sea conditions, up to sea state 6 and beyond. To achieve this performance, the NSM 400 features a peak torque of 350 Nm to withstand even 1.5 G lateral acceleration*. Users who choose an NSM 400 not only opt for an extremely powerful Mount, but also for one with a uniquely large stabilization range. The NSM 400 compensates for movements in roll and pitch up to ≤±20°. Even an installation at high altitudes, such as on 30-meter high masts, does not affect its performance. Designed to work 24/7 it offers an unmatched stabilization accuracy of ≤0.4° rms without external IMU data. It is also possible to feed in NMEA frames or ship data to improve the long-term stabilization performance of the Mount.
NSM 400 offers new communication standards
The NSM 400 offers another innovation as it is the first stabilization platform equipped with an Ethernet port. This enables the user to integrate the Mount into a network. Numerous advantages result from this, such as communication with the Mount over long distances and the possibility to easily access the Mount from different devices within the network as well as the simultaneous configuration if several Mounts are integrated in the network.