Autonomous mission workflows demand speed, clarity, and confidence. Klein’s MANTIS UUV represents a new implementation of advanced side scan sonar technology for unmanned underwater vehicles, combining latest-generation components with advanced processing for dynamic focusing, multiple-look processing, and adaptive beamforming. The result is consistent, high-resolution sonar imagery across changing survey ranges and speeds, creating an ideal foundation for machine learning and AI-assisted analysis.
Built for demanding autonomous missions, MANTIS UUV is engineered for UUV platforms where space, power, speed, and data handling are critical to mission success. The system combines Klein’s advanced side scan sonar performance with a compact payload architecture designed to support route survey, mine countermeasures support, search and recovery, hydrographic and geophysical survey, offshore infrastructure inspection, and environmental mapping.
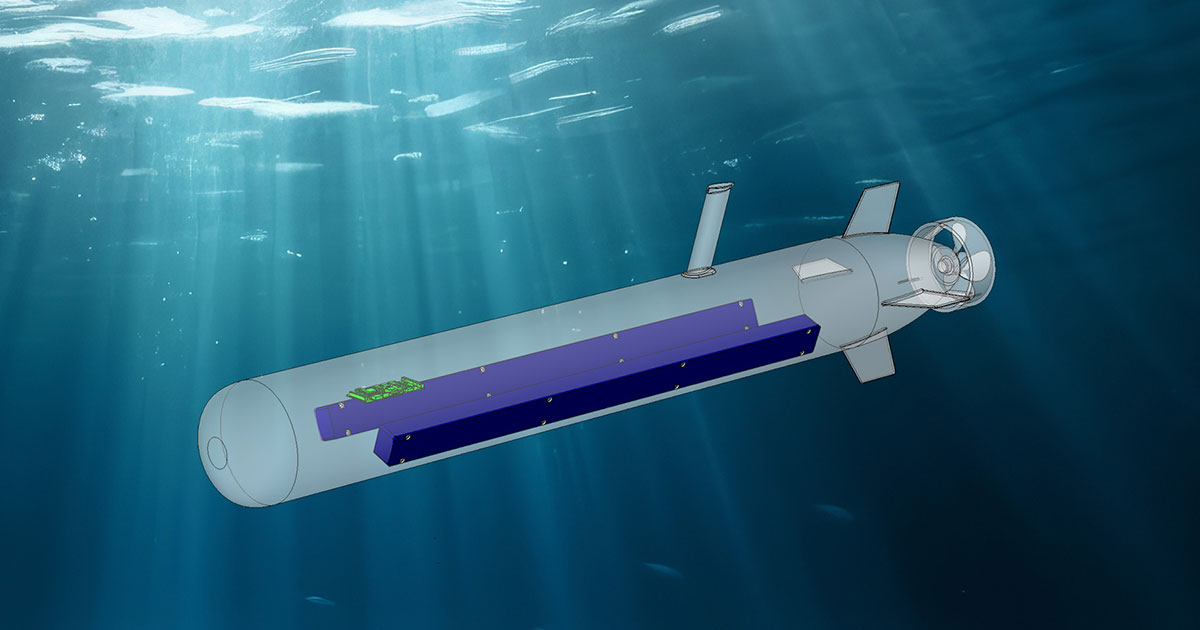
At the core of MANTIS UUV is Klein’s SmartArray Technology™, an integrated system architecture that embeds key electronics directly within the transducer array. This approach helps reduce system footprint, lower size and power demands, and preserve valuable vehicle payload space.
“Innovation has always been at the heart of everything we do at Klein,” said Ted Curley, Executive Vice President and General Manager of Klein Marine Systems. “With MANTIS UUV, we are bringing advanced imaging performance, onboard processing, and practical integration together in a way that supports the future of autonomous underwater operations.”
MANTIS UUV is designed to operate at higher speeds across all ranges, while processing sonar data onboard in real time so operators and autonomous systems can act on information faster. Ethernet-based connectivity simplifies integration with modern UUV platforms and supports real-time review, playback, and analysis workflows.




