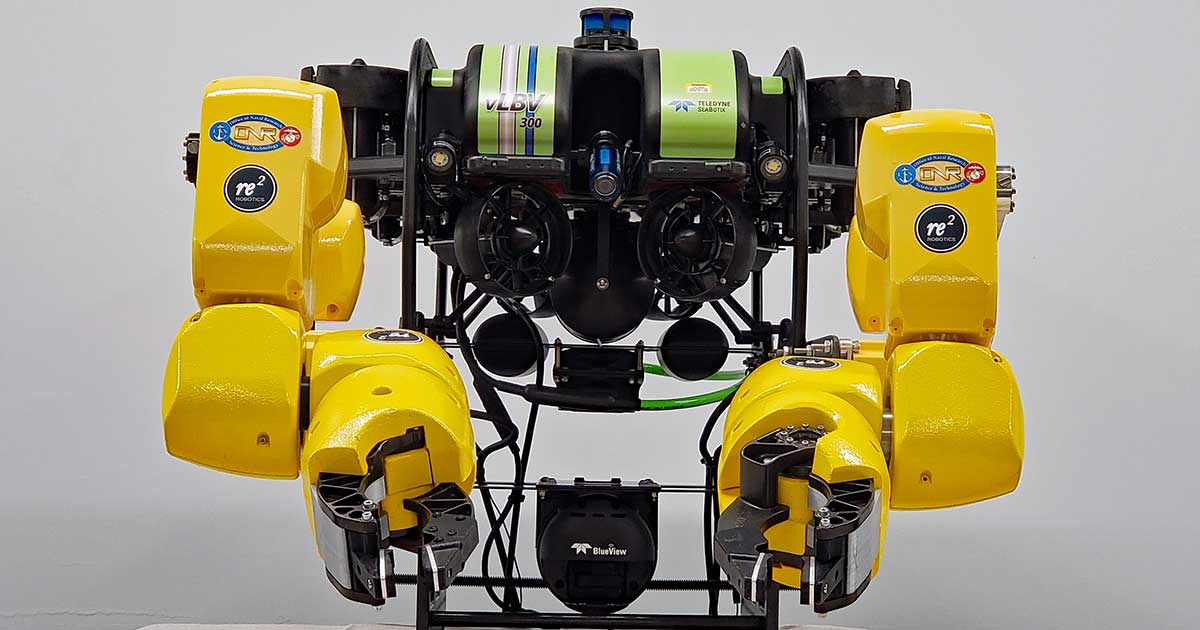
Using next-generation tactile sensing technology and a multi-finger, electromechanical design, STARFISH will allow operators to locate, identify and neutralize hidden and visible explosive threats on land and underwater. STARFISH-enabled manipulators will be deployed on both ground-base and underwater robotic system to defeat explosive threats.
“The development of STARFISH takes underwater robotic technology to the next level by providing operators with the ability to ‘feel’ and sense the environment around them while remaining at a safe distance,” said Jorgen Pedersen, president and CEO of RE2 Robotics. “The use of advanced tactile sensing and intelligent grasping will improve operational performance by removing operators from dangerous areas and allowing them to quickly and accurately respond to explosive threats.”
RE2 will work with researchers at UCLA and the University of Washington to develop the hand, which will use state-of-the-art tactile skin and sensorized fingertips that are capable of sensing normal and shear forces. Operators will command the hand using information provided by external sensing, such as cameras, sonar or LIDAR, which will then be processed with machine-learning algorithms to assist the operator in manipulating the object.
“Tactile sensing at the end effector can provide a wealth of information about the environment to a robotic system and its operator,” said Dr. Andrew Mor, RE2 principal investigator. “Using a rich network of sensing, machine learning and assisted manipulation, STARFISH will be able to perceive and then share its interpretation of the environment with the operator, allowing Naval expeditionary forces to manipulate and control the robot at human speed.”
For more information, click here.