The difficulties of conducting and repeating sea campaigns, coupled with technological advancements, have driven the development of AUVs with multimodal perception payloads and hovering capabilities, enabling simultaneous exploration, surveying, and inspection. The SPARUS III AUV from IQUA Robotics embodies these characteristics and can be equipped with a comprehensive and complementary suite of sensors, including acoustic (sidescan sonar, multibeam echosounder, or forward-looking sonar), optical, and magnetic sensors, as well as precise navigation systems and sensors for measuring water parameters.
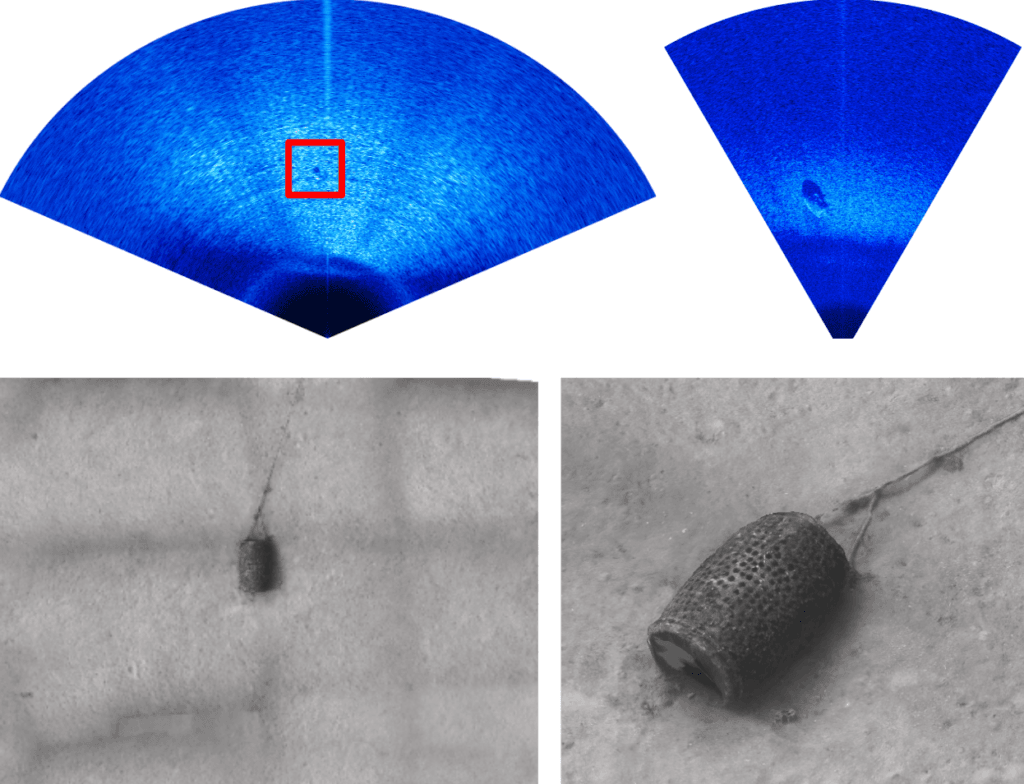
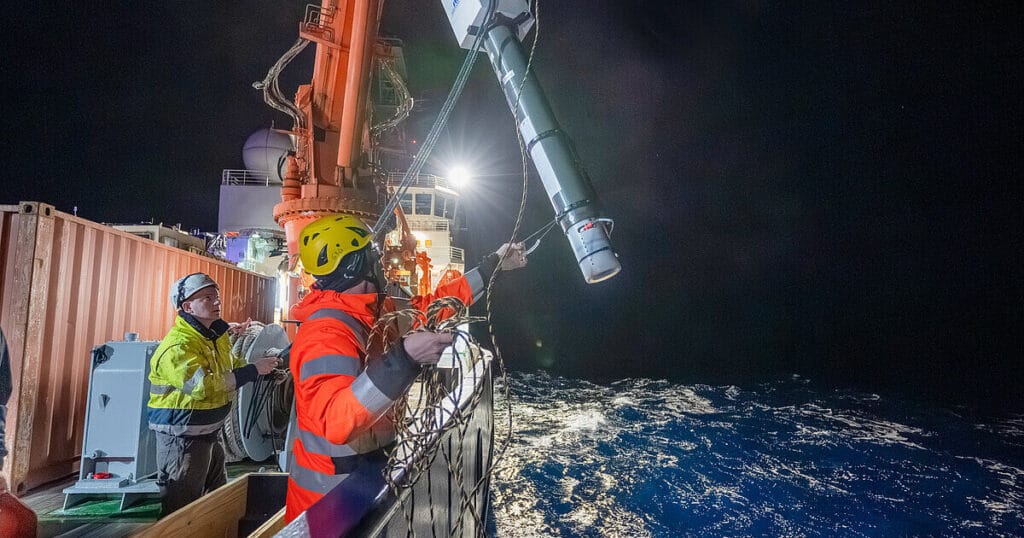
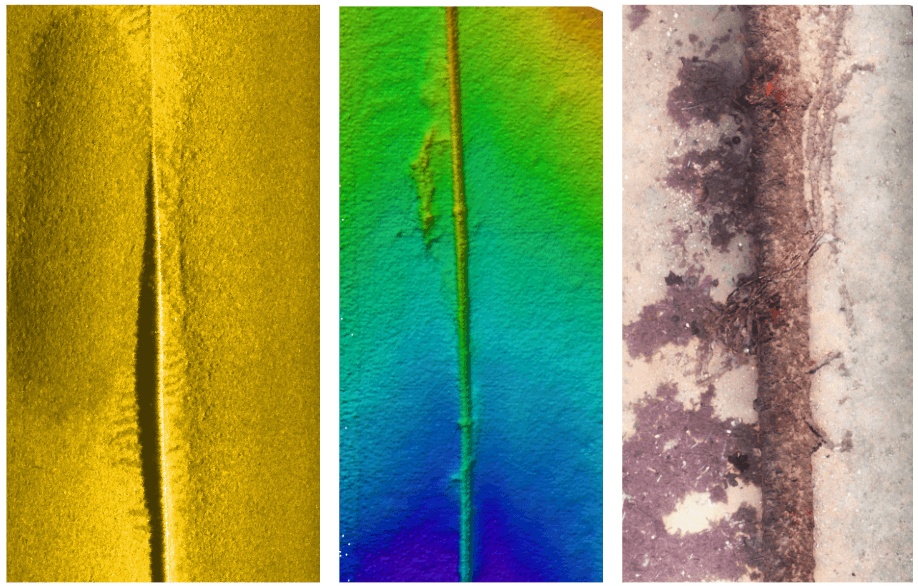
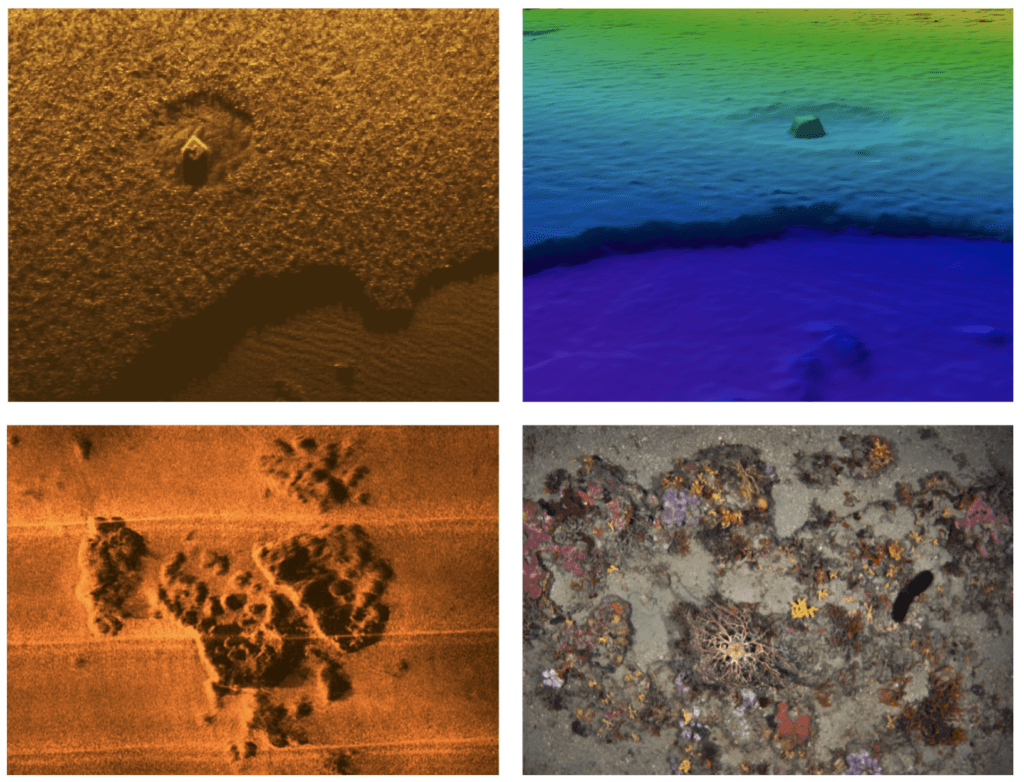
Thanks to its ease of deployment and recovery, simple operation, and streamlined processing pipelines, SPARUS II can perform consecutive missions from a support vessel, enabling a rapid cycle of data collection, analysis, and planning for successive missions based on previous findings. Sensors with broader coverage, such as side scan sonar (SSS) or multibeam echosounder (MBES), are used to explore and locate areas of interest. The ability to acquire data from complementary sensors during the same mission—such as comparing the sonar intensity map from the side scan sonar with the point cloud generated by the MBES—enables a more accurate interpretation of the scene. Higher-resolution sensors, such as forward-looking sonar (FLS) or optical cameras, provide detailed mapping of the scene. Additionally, the possibility of setting up a scanning trajectory that acquires data in all directions with precise control allows the capture of the necessary information for a later reconstruction of the inspected area.
The SPARUS II AUV is designed to accommodate the latest sensor and navigation technologies. Its robust structure and sufficient power/autonomy enable it to operate in challenging maritime conditions for a full workday. This small-class AUV can reach a maximum depth of 200 meters and can be easily operated from a variety of vessels by a team of two people.
Available software tools simplify mission planning, monitoring, and rapid data processing, allowing users to quickly analyze the AUV’s findings while they remain on the surface, ready for the next mission. Alternatively, real-time data processing can be performed onboard, directly linking environment exploration with inspection tasks when a target is automatically detected. Artificial intelligence plays a vital role here in scene recognition and decision-making.