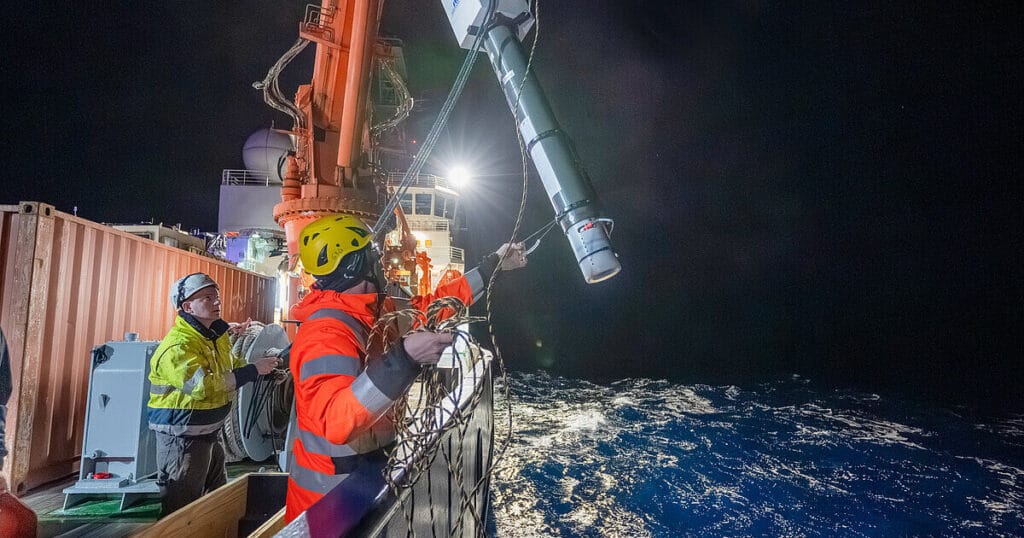
Open Ocean Robotics, as a member of Team @Orchard, is deploying its solar-powered DataXplorer™ uncrewed surface vehicle (USV), paired with XplorerView™, to sustain meteorological and oceanographic observations at NOAA’s Station 46012.
Operating approximately 10 nautical miles offshore, DataXplorer has collected 19 weeks of continuous, near-real-time in situ environmental observations while maintaining controlled station-keeping at assigned monitoring coordinates. The platform is acquiring parameters aligned with NOAA’s National Data Buoy Center (NDBC) measurement scope, with hourly datasets transmitted via redundant cellular and satellite communications.

Data streams are structured for integration with NOAA quality control and dissemination workflows, supporting operational forecasting and public access through national and global distribution systems.
Mission oversight, telemetry review, and system diagnostics are conducted remotely through XplorerView, enabling persistent monitoring while reducing reliance on vessel-based servicing.
Unlike traditional fixed buoys that require moorings and scheduled maintenance campaigns, DataXplorer operates using integrated solar arrays and onboard battery storage. The fully electric platform produces zero greenhouse gas emissions during deployment and reduces the operational footprint associated with in situ observing infrastructure, particularly important within a designated National Marine Sanctuary.

By sustaining core buoy observation functions through a renewable-powered, mobile USV platform, this deployment contributes to the resilience and modernization of national observing systems while advancing sustainability objectives.
With 19 weeks of continuous data delivered and operations ongoing, the project demonstrates how uncrewed maritime systems (UMS) can support high-quality environmental intelligence with minimal operational impact.